باحثان فى الجامعة المصرية الروسية يحصلان على جائزة أفضل دكتوراه وماجستير
أعلن الدكتور شريف فخرى محمد عبدالنبى، رئيس الجامعة المصرية الروسية، أنه فى إطار سعى الجامعة لتحقيق التميز فى البحث العلمى والرسائل العلمية، والالتزام بتقديم أبحاث مبتكرة تُسهم فى خدمة شتى المجالات محليًا ودوليًا، حصل أثنين من منتسبى “قسم هندسة الميكاترونيات والروبوتات” فى كلية الهندسة بالجامعة على جائزة أفضل رسالة علمية من جامعة عين شمس، حيث حصل الدكتور محمد فوزى الخطيب، المدرس بالقسم، على جائزة أفضل رسالة دكتوراه فى “هندسة الميكاترونيات” للعام الأكاديمى 2023–2024، وحصل المهندس السيد عاطف السيد عينر، المدرس المساعد بالقسم نفسه، على جائزة أفضل رسالة ماجستير فى نفس التخصص ومن نفس الجامعة.

أشار رئيس الجامعة المصرية الروسية، إلى أن هذا الإنجاز يأتى برعاية الدكتور محمد كمال مصطفى، رئيس مجلس أمناء الجامعة، وضمن استراتيجية الجامعة لرفع الكفاءة العلمية والبحثية لأعضاء هيئة التدريس.

فى ذات السياق، أوضح الدكتور علاء محمد البطش، عميد كلية الهندسة بالجامعة المصرية الروسية، أنه تم تكريم الباحثين خلال المؤتمر العلمى السنوى لكلية الهندسة فى “جامعة عين شمس”، تقديراً لفوزهما بجائزتى أفضل رسالة دكتوراه وأفضل رسالة ماجستير فى التخصصات المذكورة عن العام الأكاديمى 2023–2024.
أضاف عميد كلية الهندسة بالجامعة المصرية الروسية، أن الباحثَين يُعدّان من الكفاءات الأكاديمية بقسم هندسة الميكاترونيات والروبوتات بالكلية، حيث تخرّج الدكتور محمد فوزى الخطيب من برنامج هندسة الميكاترونيات والروبوتات بالجامعة المصرية الروسية دفعة 2014 كأحد أوائل دفعته، وعُين معيداً بالقسم، ثم حصل على درجة الماجستير من الأكاديمية العربية للعلوم والتكنولوجيا والنقل البحرى، قبل أن يكلل مسيرته الأكاديمية بدرجة الدكتوراه من جامعة عين شمس برسالته المتميزة، كما تخرّج المهندس السيد عاطف عينر أيضا من برنامج هندسة الميكاترونيات والروبوتات بالجامعة المصرية الروسية دفعة 2017، وتم تعيينه معيداً بالكلية كونه واحدا من أوائل دفعته، وواصل مسيرته الأكاديمية بالتسجيل للحصول على درجة الماجستير من هندسة عين شمس برسالتة الفائزة.
من جانبه، أكد الدكتور محمد فوزى الخطيب، المدرس بقسم هندسة الميكاترونيات والروبوتات بكلية الهندسة بالجامعة المصرية الروسية، أن عنوان رسالته هو: “مقترح لمتحكم إقتصادى ذكى لإستخراج القدرة القصوى من أنظمة خلايا فوتوفولتية للتعامل مع أنواع مختلفة من الأحمال”، تحت أشراف: “الدكتور محمد نبيل سعد الدين صبرى الأستاذ بكلية الهندسة بجامعة عين شمس، الدكتور محمد إبراهيم أبو السبح الأستاذ المساعد، بمعهد بحوث الإلكترونيات، والدكتور شادى أحمد ماجد الأستاذ المساعد، بكلية الهندسة بجامعة عين شمس”، وتناولت الرسالة تصميم نظام كهروضوئى مستقل لتغذية أنواع متعددة من الأحمال، مثل محطة شحن مستقلة للمركبات الكهربائية، ونظام شمسي لضخ المياه لخدمة المناطق الريفية.. مشيراً أن الدراسة شملت تحليلًا تفصيليًا لمكونات النظام ونمذجته، مع التركيز على تحسين الكفاءة من خلال تعظيم إستخلاص الطاقة من الخلايا الشمسية وتلبية إحتياجات الأحمال المختلفة بفاعلية.
أوضح المدرس بقسم هندسة الميكاترونيات والروبوتات بكلية الهندسة أن أبرز الجوانب الابتكارية فى الرسالة تشمل:
1- تصميم نظام كهروضوئى مستقل يخدم تطبيقات متعددة مثل شحن السيارات الكهربائية وضخ المياه فى المناطق النائية.
2- رفع كفاءة النظام عن طريق تعظيم إستخلاص الطاقة من الخلايا الشمسية.
3- تطوير وحدتي تحكم ذكيتين جديدتين لأول مرة: وحدة تحكم مبسطة ذكية لإستخلاص الطاقة من الخلايا الشمسية “SUI-PID” ووحدة تحكم ضبابية متعددة درجات الحرية .”MDOF-FLC”
قال الدكتور محمد فوزى الخطيب، أنه تم عمل مقارنة شاملة مع تقنيات تحكم ذكية أخرى مثل: “ANN، FNN، PSO-FLC، وFLC”؛ لتقييم الأنظمه المقترحة وإتضح من المقارنة تفوق وحدات التحكم المقترحة على وحدات التحكم المبسطة الذكية “SUI-PID” فى الأداء من حيث الكفاءة والثبات وسهولة التطبيق وتم تدعيم النتائج النظرية بتجارب عملية تؤكد جدواها.
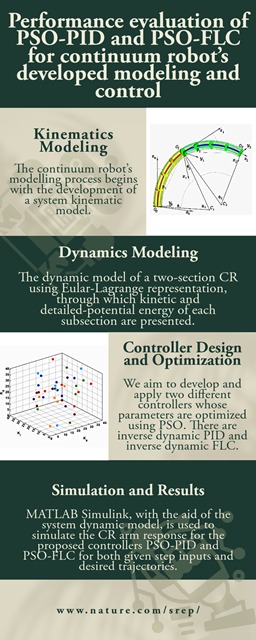
فى الموضوع ذاته، قال الباحث المهندس السيد عاطف السيد عينر، المدرس المساعد بقسم هندسة الميكاترونيات والروبوتات بكلية الهندسة بالجامعة المصرية الروسية، أن رسالته جاءت تحت عنوان: “التحقيق فى تأثير أساليب التحكم المختلفة على أداء ذراع روبوت مرن”، وضمت لجنة الإشراف “الدكتور محمد إبراهيم محمد عوض رئيس قسم هندسة الميكاترونيات، بكلية الهندسة بجامعة عين شمس، والدكتور عمر محمود محمد شحاتة الأستاذ المساعد، بكلية الهندسة بجامعة عين شمس”، وتناولت الرسالة تطوير إستراتيجيات تحكم عالية الدقة لذراع روبوتية مرنة تشبه المجسات، وتتميز بقدرتها على الإنحناء وأداء مهام معقدة بدقة فى بيئات متنوعة.. مشيراً أن الرسالة اعتمدت على نموذج ديناميكى تم بناؤه باستخدام صياغة أويلر–لاغرانج “Euler–Lagrange”؛ لدراسة تفاعل القوى المختلفة المؤثرة على حركة الذراع.
أشار المهندس عاطف عينر، إلى أن الرسالة تتفوق فى جانبين متكاملين هم: الدمج بين النمذجة الديناميكية المتقدمة والتحسين الذكى لمعاملات النظام، وتم بناء منصة محاكاة وتصور ديناميكى بإستخدام “MATLAB/Simulink”، تُسهّل إختبار وتطوير أنظمة التحكم فى بيئات قريبة من الواقع؛ مما يمهّد الطريق لتطبيقات واعدة فى مجالات مهمة مثل الجراحة الدقيقة، البحث والإنقاذ، والإستكشاف تحت الماء.