
تطوير نموذج روبوت مستوحى من حركة الكلاب لتعزيز مرونة المشى
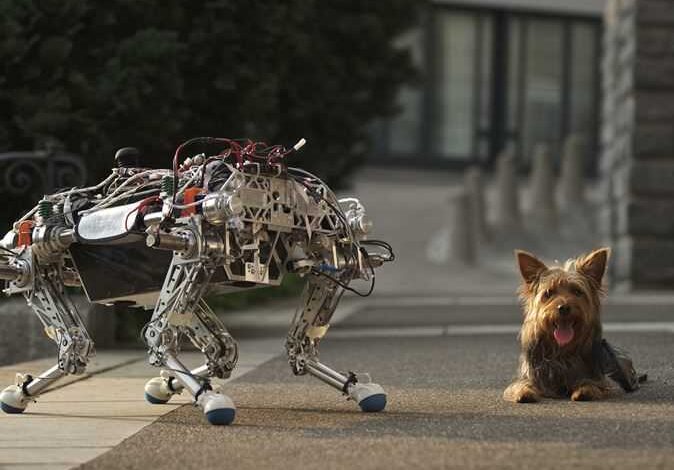
نجح فريق من الباحثين فى تطوير نموذج روبوت جديد يعتمد على دراسة دقيقة لحركة الكلاب خصوصا فى منطقة الكتف التى تتميز بمرونة كبيرة وتعتبر عنصرا أساسيا فى قدرة الكلاب على الجرى والقفز والتعامل مع التضاريس الوعرة.
ويعد هذا العمل من الدراسات النادرة التى تتناول التفاصيل البيولوجية الدقيقة لحركة الكتف الحيوانى بهدف تحسين تصميم الروبوتات.
تتمتع الكلاب بكتف غير مرتبط مباشرة بالهيكل العظمى ما يمنحها قدرة طبيعية على امتصاص الصدمات وتوزيع القوى عند الحركة هذا النظام الحيوى الفريد يوفر للحيوان حركة سلسة وكفاءة عالية على مختلف أنواع الأرضيات.
وهو ما حاول الباحثون نقله إلى النموذج الروبوتى الجديد من خلال ذراع ميكانيكية تحاكى تلك الحركة الواقعية بحسب Wiley Online Library.
من خلال محاكاة حركة الكتف الحيوانية تمكن الباحثون من جعل الروبوت أكثر ثباتا وقدرة على الحفاظ على توازنه أثناء المشى مع تقليل الاهتزازات الشائعة فى الروبوتات التقليدية ويساهم هذا التطوير فى رفع كفاءة الحركة ما يفتح المجال لاستخدام الروبوتات فى بيئات أكثر تحديا.
أشار الباحثون إلى أن الاعتماد على الطبيعة فى تصميم المفاصل والأطراف يمكن أن يحدث تغييرا كبيرا فى مستقبل الروبوتات مع امكانية تطوير نماذج قادرة على تنفيذ مهام معقدة مثل عمليات البحث والانقاذ والتنقل فى الاماكن الضيقة أو الخطرة.
وتؤكد الدراسة أن فهم التفاصيل الدقيقة فى حركة الحيوانات قد يقرب الروبوتات من الحركة الطبيعية للكائنات الحية اكثر من أى وقت مضى.







